Hi, I'm Antonio Iannone
Robotics & Computer Engineer
A recent graduate from Keio University (Japan) and École Centrale de Nantes (France), holding a prestigious Erasmus Mundus Joint Master's Degree in Advanced Robotics. My unique international education has equipped me with a robust technical skillset and a global perspective on solving complex problems in robotics, control systems, and artificial intelligence.
Languages & Interests: Beyond my technical work, I am fluent in Italian and English, with a basic knowledge of French and Japanese. In my free time, I enjoy hiking, photography, and practicing sports.

Education & Diplomas
Erasmus Mundus Joint Master Degree
A prestigious international double degree program in Advanced Robotics.
M.Sc. in Advanced Robotics
École Centrale de Nantes, France
2023 - 2024
M.Sc. in Science & Engineering
Keio University, Japan
2024 - 2025
My Projects
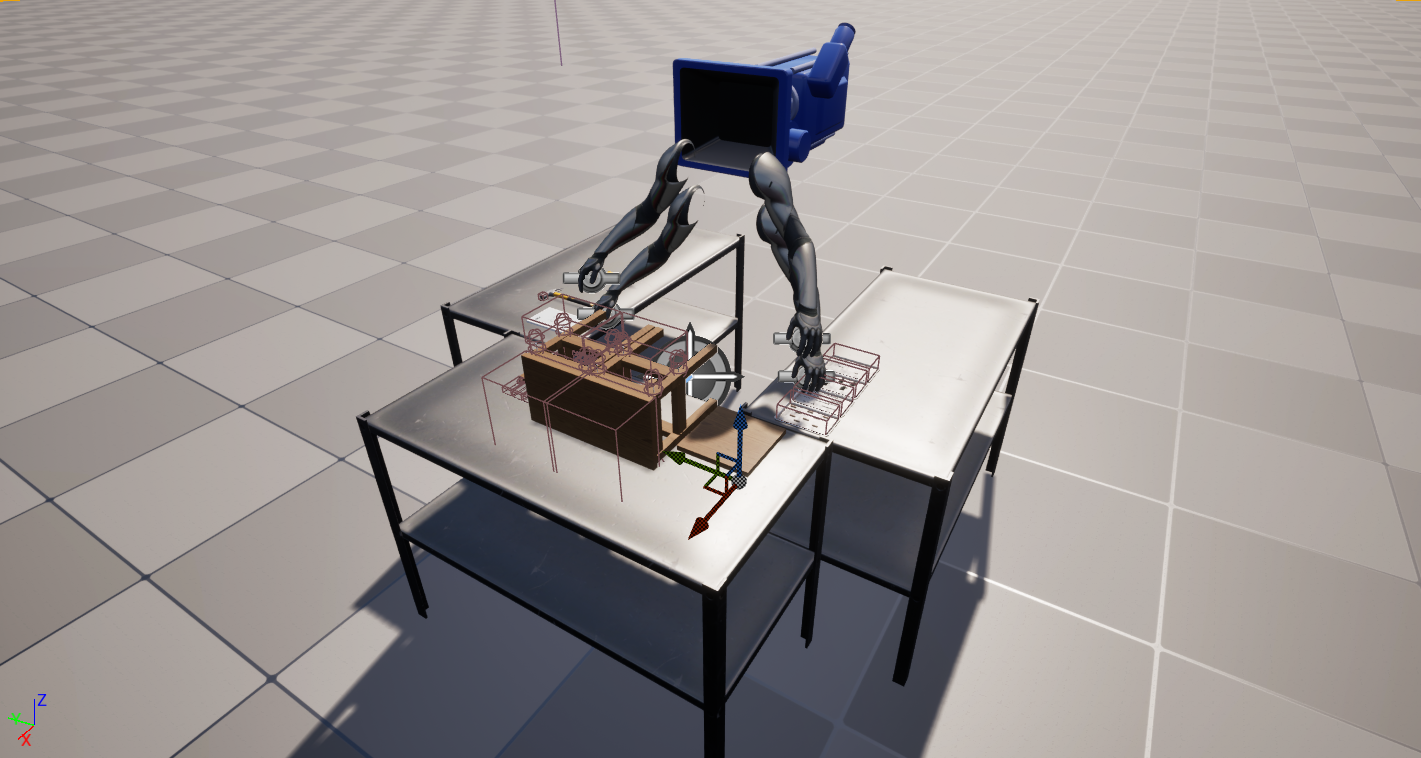
Master's Thesis: Robotic Limb Control in Virtual Reality
Developed and validated a modular VR testing environment in Unreal Engine 5 to explore control strategies and the sense of embodiment for Supernumerary Robotic Limbs (SRLs).
Key Tech: Unreal Engine 5, C++/Blueprints, Python, VR (Meta Quest 3)
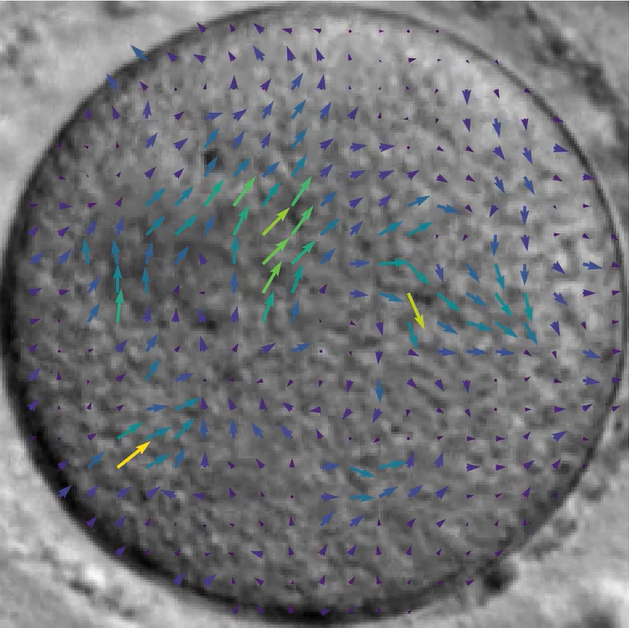
AI Research Fellow: Oocyte Analysis for IVF
Led a research project on applying AI to In Vitro Fertilisation, resulting in a first-author publication.
Key Tech: Python, OpenCV, PyTorch, CNNs, Flask, HTML/CSS
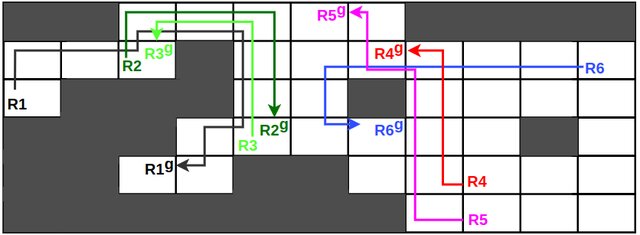
B.Sc. Thesis: Multi-Robot Task-Motion Planning
Developed a C++ framework to solve integrated Task and Motion Planning (TMP) problems for multi-robot systems.
Key Tech: C++, PDDL, Dijkstra's Algorithm, AI Planning
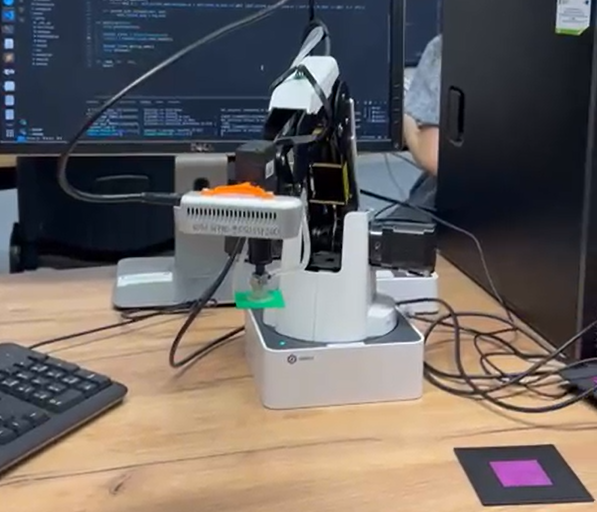
Project: JEMARO Days Robotics Competition
As part of a team, developed a full software stack in Python and ROS2 for a multi-challenge robotics competition.
Key Tech: Python, ROS2, OpenCV, State Machines, Computer Vision
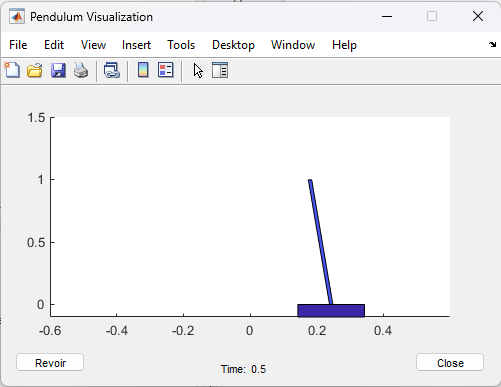
Course Project: Control of an Inverted Pendulum
Designed and implemented a full state-space controller for the classic inverted pendulum problem.
Key Tech: MATLAB, Simulink, Control Theory, State-Space

Course Project: EKF for Mobile Robot Localization
Implemented an Extended Kalman Filter (EKF) from the ground up in MATLAB to solve the 2D localization problem for a differential drive robot.
Key Tech: MATLAB, Extended Kalman Filter (EKF), Robotics, State Estimation
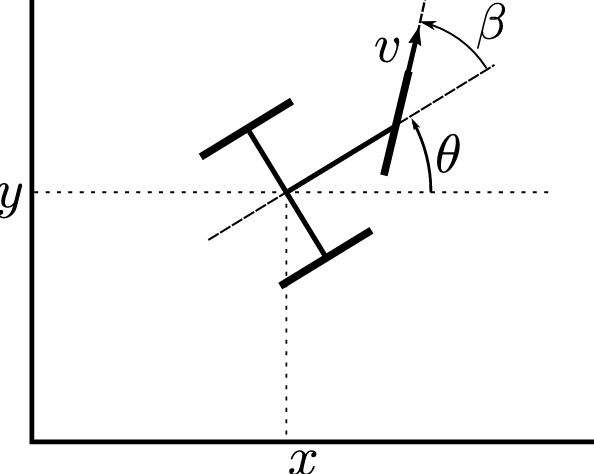
Course Project: Trajectory Tracking Control for Mobile Robots
Implemented and compared two non-linear control laws (Static Feedback and Lyapunov-based) in MATLAB & Simulink to enable a mobile robot to follow a desired trajectory.
Key Tech: MATLAB, Simulink, Control Theory, Robotics, Lyapunov Stability

Course Projects: Software Architecture for Robotics (ROS2)
A series of five hands-on projects developing C++ and Python nodes in ROS2.
Key Tech: ROS2, C++, Python, Gazebo, URDF, Navigation2

Course Project: Deep Learning for Object Detection
Implemented the anchor-free CenterNet object detection model from scratch in Python using PyTorch.
Key Tech: Python, PyTorch, Deep Learning, Computer Vision, CNNs
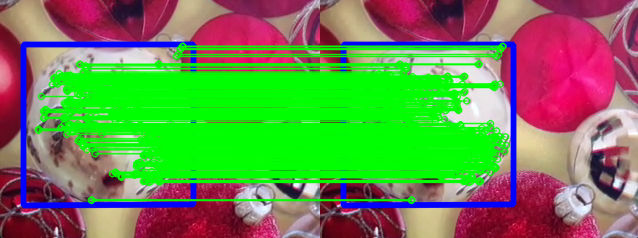
Course Projects: Computer Vision for Robotics
A series of three labs covering fundamental computer vision techniques.
Key Tech: Python, OpenCV, PyTorch, Computer Vision, Deep Learning
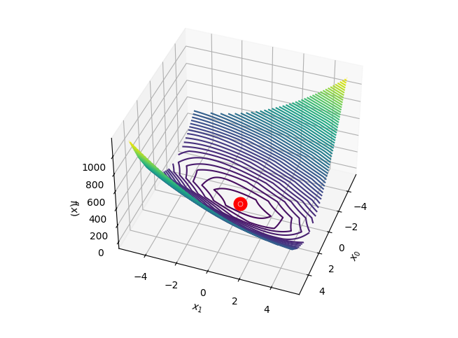
Course Projects: Optimization Techniques
A two-part laboratory series implementing and analyzing core optimization algorithms in Python.
Key Tech: Python, NumPy, SciPy, Optimization, Linear Algebra
Technical Skills
Programming Languages
- Python
- C / C++
- JavaScript
- SQL
Frameworks & Libraries
- Pandas / NumPy
- Scikit-learn
- Angular
- ROS
Tools & Software
- Git & GitHub
- Unreal Engine 5
- MATLAB & Simulink
Get In Touch
I'm currently looking for new opportunities. Feel free to reach out!